#20220421 BİLGİSAYARLI GÖRÜ VE OTONOM SÜRÜŞ DESTEKLİ ÇOK AMAÇLI ROVER SİSTEMİ TASARIMI
| PROJE KODU | 20220421 |
| PROJE SAHİBİ | Mehmet Ulaş Akduman |
| PROJE SAHİBİ LINKEDIN | https://www.linkedin.com/in/mehmet-ula%C5%9F-akduman-044014177/ |
| PROJE MALİYETİ | Ortalama olarak 1600 TL |
| PROJE ÜNİVERSİTESİ | Ege Üniversitesi |
| PROJE KATEGORİSİ | Endüstri ve Otomotiv |
| PROJE DANIŞMANI | Prof. Dr. Aybars UĞUR |
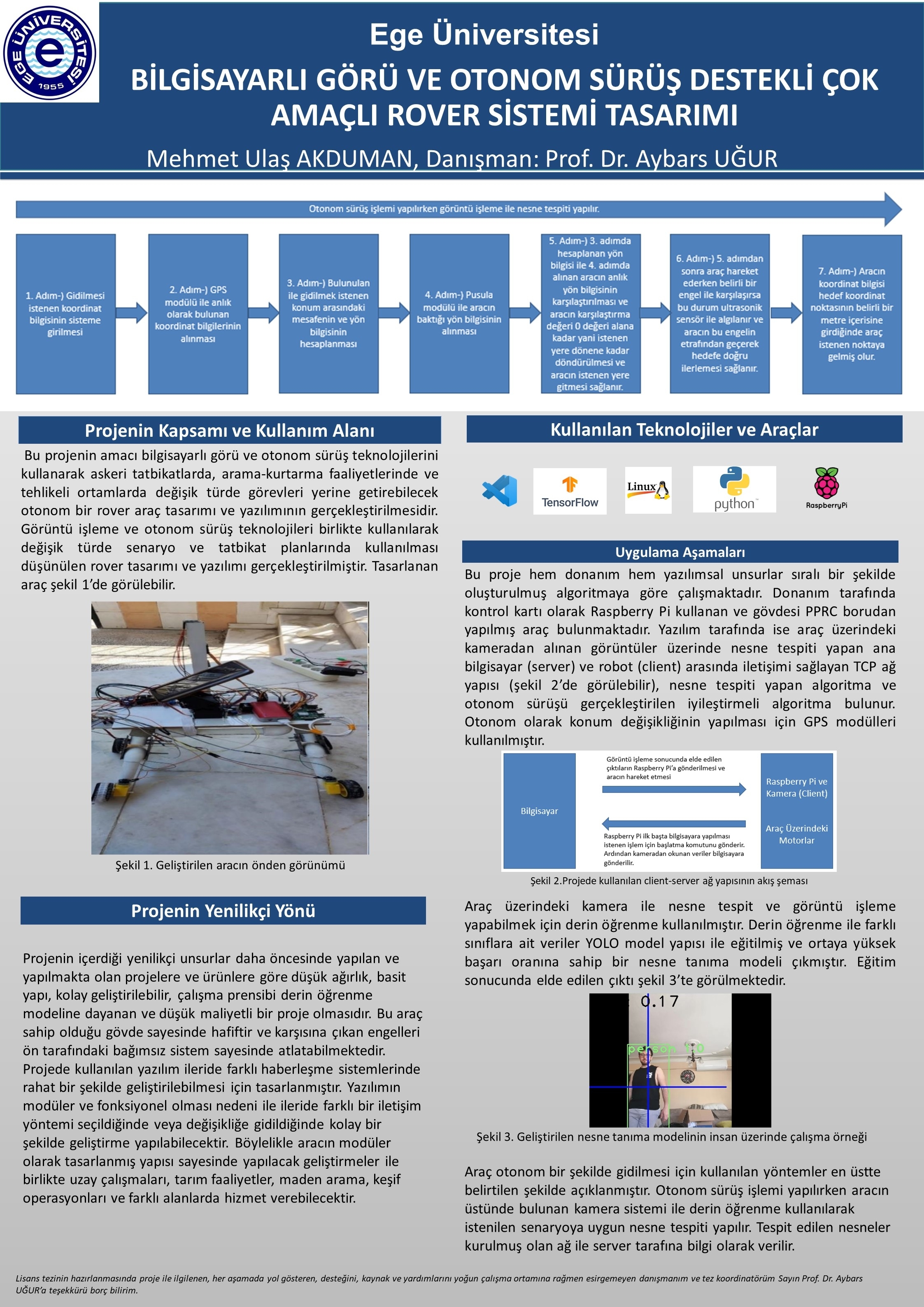
Bu projede askeri tatbikatlarda, acil durumlarda, arama-kurtarma faaliyetlerinde kullanılmak üzere yapay zekanın derin öğrenme alt başlığı altında bulunan nesne tespiti algoritmalarını kullanan ve otonom bir şekilde istenen konuma gidebilen bir rover araç tasarlanmıştır. Araç çeşitli alanların ortak ihtiyaçları düşünülerek PPRC boru gövdesi üzerine inşa edilmiştir. Aracın ön tarafının ana gövdeden ayrı olması sayesinde araç karşısına çıkan engelleri bütünlüğünü bozmadan geçebilmektedir. Rover tipi araçlar günümüzde uzay çalışmaları yürüten ülkeler ve firmalar tarafından oldukça fazla kullanılmaktadır. Bu araç sahip olduğu kameradan aldığı görüntüden nesne tanıma işlemlerini gerçekleştirebilmektedir. Aracın üstünde yer alan servo motorlara bağlı kameralar ile istenen nesneler takip edilir izlenebilir. Bu sayede geliştirilebilecek nesne tanıma modelleri ve algoritmalar ile hem arama-kurtarma gibi sivil faaliyetlerde kullanılabilirken hem de sahip olduğu hareketli başlık sayesinde askeri alanlarda saldırı, savunma, düşman tespiti, yaralı tespiti gibi işlemleri de yerine getirebilecektir. Bu işlemler gerçekleştirilirken istenen GPS konumuna otonom bir şekilde gidilir ve aracın gerçekleştirmiş olduğu ve yapabileceği eylemler kurulmuş olan ağ ile ana kullanıcıya iletilir. Böylelikle araç belirli bir GPS konumunda istenen başka bir konuma giderken hem otonom sürüş özelliklerini hem görüntü işleme kabiliyetlerini yerine getirmiş olur. Bu sayede çeşitli alanlarda otonom bir şekilde hizmet verilebilir; askeri alanda asker kayıplarının önüne geçilmesi, acil durumlarda insanların giremeyeceği alanlara otonom bir şekilde girilip istenen kişi veya nesnelerin bulunması gibi görevlerin yerine getirilmesinde kullanılabilir. Aracın ileriye dönük olarak farklı alanlarda geliştirilebilir olması ve kabiliyetlerinin esnetilebilir şekilde tasarlanması literatürde az görülen ve katkı sağlayıcı özelliklerdir. Günümüzde farklı alanlarda çeşitli nesne tespiti algoritmaları mevcuttur ve bu yöntemler araç ile kolaylıkla kullanılabilir.
Bu projede çeşitli alanlarda kullanılmak ve geliştirilmek üzere derin öğrenme ile tespiti yapan ve otonom bir şekilde istenilen konuma giden bir rover araç tasarlanmıştır.
Bu projenin içerdiği yenilikçi unsurlar temel olarak daha öncesinde yapılan ve yapılmakta olan projelere ve ürünlere göre düşük ağırlık, basit yapı, kolay geliştirilebilir, çalışma prensibi derin öğrenme modeline dayanan ve düşük maliyetli bir proje olmasıdır. Aracın sahip olduğu donanım klasik türde 4 ve daha fazla tekerleğe sahip araç tasarımlarından farklı bir şekilde olup NASA’nın Ay ve Mars görevlerinde kullandığı rover denilen araç tipindedir. Bu araç sahip olduğu mekaniksel özellikler sayesinde hafiftir ve karşısına çıkan engelleri ön taraftaki bağımsız sistem sayesinde atlatabilmektedir.
Projenin temel konularından biri olan derin öğrenme ile nesne tanıma görevi ileride farklı senaryolar ve görevler için özelleştirilebilmektedir. Otonom sürüş, nesne tanıma modeli ve algoritmada yapılacak değişimler ile araç farklı arazi koşullarında, farklı durum ve senaryolarda hizmet verebilecektir. Böylelikle araç sadece askeri operasyonlar, arama-kurtarma faaliyeti gibi sınırlı alanlar haricinde maden çalışmaları, keşif operasyonları, uzay çalışmaları, tarım faaliyetleri, üretim ve dağıtım işlemleri ve gündelik olarak görev yüklenebilecek çoğu işi yapabilecektir. Araç üzerinde yer alan ekipmanlar harici boş yer bırakılmasındaki temel sebep budur; ileride istenildiği taktirde aracın üstüne hareket edebilir kol, radyo anteni, silah, lazer, matkap gibi bilimsel ve teknik enstrümanlar yerleştirilebilecektir.
Bu projenin ticari bir ürün veya profesyonel olarak kullanılabilmesi için donanımın ve yazılımın birleştirilmesi ve ilgili testlerinin yapılması gerekmektedir. Projenin hem şuan hem de ileri geliştirilebilecek farklı senaryo ve görevlerde kullanılabilmesi için kullanılacak olan teknoloji, malzeme ve teknolojik bileşenler günümüzde mevcuttur. Robotun gövdesini oluşturan PPRC boru, kameralar, motorlar, elektronik bileşenler günümüzde farklı alanlarda oldukça fazla kullanılmakta ve kendini ispatlamış birimler ve ürünler olduğu için bu projenin gerçekleşmesi günümüz şartlarında mümkündür.
Prof. Dr. Aybars UĞUR - Ege Üniversitesi - 0532 501 05 74 - aybars.ugur@ege.edu.tr
Projede herhangi bir yatırımcı bulunmamaktadır.
Bu proje hayata geçtiğinde çeşitli alanlarda kullanılan çözüm yöntemlerini değiştirebilir veya kullanılan çözüm yöntemine destekte bulunabilir. Günümüzde askeri alanda tehlikeli görevlerin yerine getirilmesinde, tehlikeli alanlarda maden arama faaliyetlerinde, tarım uygulamalarında, arama-kurtarma operasyonlarında, tatbikatlarda ve acil durumlarda kullanılabilir. Belirtilen alanlarda kullanıldığı durumda hem can güvenliğinin sağlanması ve daha az efor ile yüksek verimlilik alınması sağlanabilir.
Günümüzde hem yabancı hem de milli olarak geliştirilen proje paralelinde projeler geliştirilmiş ve özelleştirilmiş görevlerde kullanılmaktadırlar. Bu projeler temeli itibari ile silah sistemlerine sahip mini tanklar, üzerinde bulundurduğu teleskobik kol sayesinde mayın arama ve bomba imha işlerinde kullanılan robotlar, askeri eşyaları taşımak için geliştirilmiş mini tanklar gibi alanlarda çalışmaktadır. Bu projelerde kullanılan yöntemlerin temeli genel olarak radyo bazlı haberleşme ile uzaktan kontrol edilmesi ve istenen görevin insan hayatına zarar vermeden gerçekleştirilmesidir. Askeri alan ve görevlerin dışında diğer alanlarda da görev yapabilecek projeler mevcuttur ama pratik olarak sahada görev yapan proje sayısı oldukça azdır. Bunun temel sebebi ise özelleştirilmiş alanlarda kullanılacak robotlardan alınacak verimin düşük olacağı düşüncesidir.